Tangan biohybrid bergerak dengan otot makmal
Para saintis di University of Tokyo dan Waseda University telah membina tangan biohybrid yang bergerak, menggenggam objek, dan membuat gerak isyarat.Baca terus!
Penyelidik dari University of Tokyo dan Waseda University di Jepun telah membangunkan tangan biohybrid yang dapat memahami objek dan membuat isyarat gunting.Mereka mencapai ini dengan menggunakan helai nipis tisu otot makmal, dibundel bersama-sama seperti gulungan sushi, untuk memberikan jari-jari kekuatan yang cukup untuk bergerak.
Penggerak berasaskan otot ini, yang dipanggil Mumutas, merupakan langkah penting ke arah mewujudkan anggota badan biohybrid yang lebih besar.Walaupun masih di peringkat makmal, Mumutas dapat membantu meningkatkan prostetik masa depan, menyokong ujian dadah pada tisu otot, dan mengembangkan keupayaan robot biohybrid untuk meniru pergerakan semula jadi.
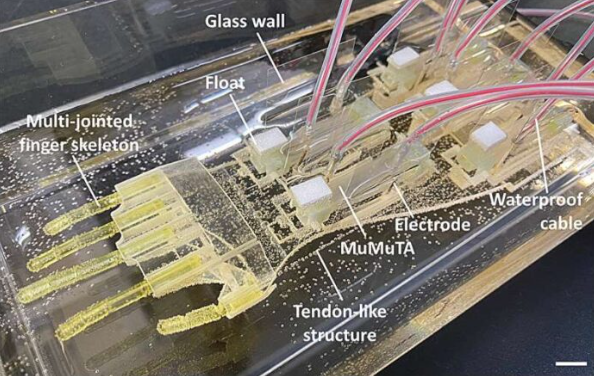
Tangan mempunyai asas plastik yang dicetak 3D dengan tendon yang diperbuat daripada tisu otot manusia yang mengawal pergerakan jari.Peranti biohybrid yang lebih awal jauh lebih kecil, sekitar 1 cm panjang, atau hanya boleh melakukan gerakan mudah, satu bersama.Sebaliknya, tangan biohybrid ini panjang 18 cm dan mempunyai jari -jari pelbagai yang boleh bergerak secara bebas untuk gerak isyarat atau bersama -sama untuk memahami objek.
Tisu otot yang tebal untuk anggota badan yang lebih besar adalah mencabar kerana ia boleh mengalami nekrosis, di mana pusat otot tidak mendapat nutrien yang cukup dan mula pecah.Untuk mengatasinya, pasukan itu menggabungkan pelbagai tisu otot nipis bersama -sama, membolehkan mereka berfungsi sebagai tendon yang lebih kuat.
Untuk menguji tangan, pasukan membuatnya melakukan isyarat gunting dengan mengidap jari kecil, jari cincin, dan ibu jari.Mereka juga menggunakan jari -jari untuk memahami dan menggerakkan hujung pipet.Ini menunjukkan bahawa tangan boleh melakukan pergerakan jari individu dan gabungan, menunjukkan kelenturannya.
Sekarang, tangan perlu kekal dalam cecair supaya otot "sauh," atau ikatan, boleh terapung tanpa geseran, membolehkan pergerakan jari licin.Walau bagaimanapun, pasukan percaya bahawa dengan penambahbaikan selanjutnya, tangan yang bergerak bebas akan mungkin.
Satu lagi cabaran adalah bahawa jari -jari tidak aktif kembali ke kedudukan permulaan mereka tetapi sebaliknya hanyut kembali sendiri.Menambah bahan elastik untuk menarik mereka kembali atau meletakkan mumutas tambahan di belakang jari untuk berkontrak ke arah yang bertentangan dapat memberikan kawalan yang lebih baik.