Robot berenang pintar yang diilhamkan oleh penyerang air
Bagaimana jika robot boleh berenang, memandu, dan berfikir seperti serangga?Ketahui bagaimana microbots dikawal cahaya dapat mengubah bagaimana kita menangani pencemaran dan cabaran perubatan.
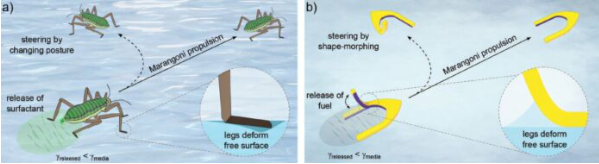
Diilhamkan oleh pergerakan serangga yang meluncur di atas air, penyelidik di University of Waterloo telah mencipta robot kecil yang dikawal oleh cahaya, membuka kemungkinan baru untuk aplikasi alam sekitar dan bioperubatan.Pasukan itu melihat pergerakan serangga Gerridae, atau penyerang air, yang melepaskan bahan kimia melalui badan mereka untuk meluncur di atas air dan menggunakan kaki mereka untuk memanipulasi permukaan, membimbing arah mereka.
Pasukan ini bergerak ke arah mewujudkan robot yang cerah dan berenang dengan tingkah laku autonomi yang lebih besar dengan membuat mereka bertindak balas terhadap isyarat luaran seperti medan cahaya atau magnet.Robot, yang direka untuk meniru serangga ini, menggunakan elastomer kristal cecair yang mengubah bentuk sebagai tindak balas kepada cahaya, bersama dengan motor kimia berasaskan protein yang diilhamkan oleh biologi sotong.
Apabila terdedah kepada ultraviolet (UV) atau cahaya yang kelihatan, kaki fleksibel robot membungkuk sama ada ke atas atau ke bawah, mengubah ketegangan permukaan air.Ini meniru bagaimana penyerang air mengarahkan, membolehkan robot bergerak ke hadapan, berpaling, atau berputar.
Protein dari cawan sedutan sotong menguasai peranti, menyerap dan melepaskan bahan api kimia untuk memacu gerakan mereka.Perkembangan robot berenang kecil dibina pada kerja sebelumnya yang diketuai oleh Shahsavan, yang memberi tumpuan kepada mewujudkan bahan komposit yang lembut dan hidrogel menggunakan nanopartikel selulosa yang mampan dari tumbuh -tumbuhan.
Pada mulanya dijalankan dengan lembaran dua dimensi, penyelidikan mempunyai aplikasi dunia yang berpotensi, seperti robot autonomi untuk membersihkan mikroplastik dalam air atau robot untuk melaksanakan prosedur perubatan khusus di dalam tubuh manusia.
Usaha masa depan akan bertujuan untuk mewujudkan robot tiga dimensi yang boleh menavigasi kedua-dua permukaan dan bawah air.Penyelidik juga meneroka kaedah pendorong alternatif, seperti medan magnet, untuk meningkatkan keupayaan robot.Pasukan ini meletakkan asas untuk generasi baru microrobots.Dengan perkembangan selanjutnya, robot berenang pintar ini dapat menavigasi persekitaran secara autonomi.